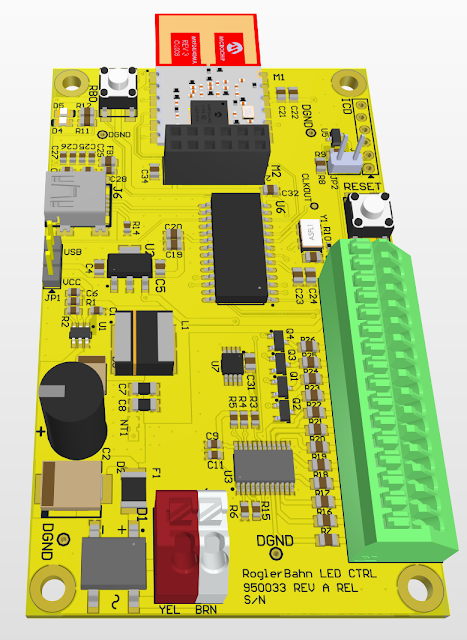
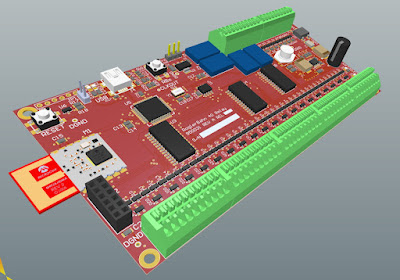
I have discussed the PCB development in these previous posts, Part 1 and Part 2. Here you can see the PCB with the power section installed and the PCB running from a train transformer.
The parts that I received from WinSource work just fine. They were about 2X the Digikey price and $50 DHL charge, put I have parts. This design uses the LMR14030, which has a 40V input maximum and a 3A output @5VDC. The 5VDC has three uses
- Power the digital section through the MCP1825ST 3.3VDC LDO
- PIC18F47J53, MRF24J40MA, MCP23S18, 24LC160
- The above use just under 75mA
- Provide miscellaneous power,
- the bias control for the switch/signal relays and power the track control relays
- This section uses < 10mA, on average
- LED power for the 7 LED channels
- This is where most of the 5VDC will be consumed.
- Probably about 60mA per channel or <500mA
This leads to a total power consumption number of less than 600mA. So the LMR14030 is a little over kill. The other two designs, the MiWi to BT Bridge and the Train LED Controller, both use the LMR140100. This DC-DC converter is from the same family as the LMR14030, but has a maximum current output of 1A, a small reduction in PCB real estate and smaller simpler package to install (no power pad). If an LMR14010 had been used, the total LED power would have been limited to about 850-900mA. At a max of 20mA per LED attached, this would provide power for about 40 to 50 LEDs. With 4 to 5 of these installed and the Train LED Controller, that would have been sufficient.
Not sure how noisy this DC-DC is, but the USB connected without issues. I then reinstalled the MiWi code and the entire system connected to the MiWi network. There are some obvious protocol issues that need to be resolved. I need to get my TEK scope out to look at the noise factor. The Analog Discovery 2 is nice, but it has limits when looking at power supply noise.
The MCP23S18 IO expanders have open drain outputs. I turned this into an advantage with the switch/signal relay control. Instead of 3.3VDC to turn on the controlling FETs, I designed a way for 5VDC to be used to turn the FETs on, driving them further into saturation and providing a little more current to drive the relays. There are 3 of these MCP23S18 16 bit IO expanders. Of the 48 ports, 40 are used for switch/signal relay control. The remaining 8 are used to control 4 track/catenary control relays (Track ON/Track OFF). These are used to control the track/catenary power to dead end track sidings. This provides the ability to park engines and not worry about power being applied to them, especially in the non-digital mode of train operation.
In my haste to get this board done before Chinese New Year holiday, I missed that the control lines to the FETs controlling these track/catenary relays did not have pullup resistors. Oops😒. Well the MCP23S18 does have weak builtin pullups that are firmware controlled. I was worried that they might be to weak to turn the FETs on. Fortunately the FETs require very little current to turn on and the track/catenay control relays work just fine.
Next is to work on the protocol issues and install the 40 FETs/diodes/resistors that control the switch/signal relays.